فایل فلش فارسی تبلت با شماره مین بردINET-DZ-REV01
و حل مشکل دوربین
کاملا تست شده بدون باگ
فایل فلش فارسی تبلت با شماره مین برد INET-86DZ-REV01 وحل مشکل دوربین


حل مشکل خاموشی Y560-U02
با مین برد a_v1.0 k
به تاریخ 2015_10_27
با لینک مستقیم و پرسرعت
تست شده و بدون هیچ مشکلی
CPU : MT6582
بدون ارور های فلشر هنگام فلش
اگر گوشی شما دارای مین برد a_v1.0 k و تاریخ 2015_10_27 و ساعت 1609 باشد قطعا گوشی شما با این فایل زنده خواهد شد




فایل فلش ZTC G.THREE پردازشگرMT6572
با مین برد A6_MB_V1.3
حجم فایل 2.35 گیگابایت
حل مشکل ویروس های اندرویدی
بدون ارور های فلشر هنگام فلش


لینک پرداخت و دانلود *پایین مطلب*
فرمت فایل:Word (قابل ویرایش و آماده پرینت)
تعداد صفحه:92
فهرست و توضیحات:
انواع رباتs
ربات ماهی :
ربات مار
ربات های عنکبودی :
بات های تسمه ای
رباتیک وصنعت
رباتیک چیست؟
تعریف ربات
دسته بندی ربات ها
ربات ها چه کارهایی انجام میدهند ؟
ساختمان ربات
سیستم های ربات صنعتی
پیکره ی ربات:
راههای مختلف برنامه ریزی ربات
مسلما اطلاعاتی که از طریق سیستمهای حسی یا سنسورهای ربات به کنترلر ربات فرستاده و یا برگردانده میشود باید مورد بررسی قرار گیرد و این خود مساله مهمی در کنترل کردن به حساب می آید.اکثرا و شاید تمامی رباتها میتوانند سنسورهای ساده ای را در خود به کار گیرند مانند: سنسورهای کلید پیوسته، سنسورهای نوری، سنسورهای هدایت کننده، سنسورهای خازنی و نوعهای دیگر.سیگنال های لازم جهت بررسی از طریق دریچه ورود و خروج کنترلر ربات به سنسورهای حسی فرستاده میشوند ولی هنوز کنترلر رباتها آن هوشمندی کافی را ندارند که بتوانند از این اطلاعات در رابطه با اصلاح کردن رفتار و حرکت ربات طبق یک برنامه مشخص قبلی و به صورت بلادرنگ یا در یک زمان واقعی مورد استفاده قرار گیرند.
روشهای انتخاب شده در نحوه ی کاربرد ربات اکثرا بستگی به محدودیتهای کنترلر دارد که ما در اینجا 4روش را به اختصار بیان میکنیم:
متصدی دستگاه یا اپراتور با استفاده از کلیدهایی مانند قطع کننده یا متوقف کننده برنامه مورد نظر را برای ربات مشخص میکند.البته این نحوه ی برنامه ریزی در کارهای خیلی ساده مانند برداشتن و گذاشتن مورد استفاده قرار میگیرد.
متصدی دستگاه یا اپراتور با استفاده از بازآموز دستی ربات و یا سیستمهای صدا که به کنترلر ربات مرتبط شده است کارگیر یا موثر نهایی را برای جا به جایی در دست میگیرد.وقتی که موثر نهایی به مکان مورد نظر میرسد مقدار تغییر در مفصلها و یا بازوهای ربات در حافظه کنترلر ربات ضبط میشود.استفاده از این روش رد مواقعی که نشان دادن مسیر مورد تقاضا از نظر ریاضی خیلی مشکل ولی انجام آن به وسیله ی متصدی ساده باشد انجام میگیرد، همچنین در مواقعی که رباتها برای داخل کردن قطعات حساس در یکدیگر به کار گرفته میشوند استفاده از برنامه ریزی هدایت مستقیم میتواند مناسبترین نوع برنامه ریزی برای رباتها باشد.:
این شیوه برنامه ریزی، متداولترین نوع برای رنگرزی، جوشکاری و کارهایی از این قبیل است.در اینجا اپراتور میتواند دسته ی گیرنده ی ربات را که به سادگی قابلیت جداشدن از ربات را دارد در دست گرفته و ابزار کار مورد نیاز را به آن متصل کند و برای کار مشخصی مورد استفاده قرار دهد.
در این نوع برنامه ریزی از زبان برنامه نویسی سطح بالا استفاده میشود.خاصیت استفاده از این زبان برنامه نویسی نزدیکی آن به زبان انسان است، چون نحوه ی نوشتن و مدیریت آن آسانتر است.گاهی این برنامه به طریق کنترل از راه دور و یا خارج از خط تولید تهیه میشود.بدین طریق که برنامه کامپیوتری مورد نظر که در فاصله دور و جدا از خط رباتیک است از طریق خطوط ارتباطی به کنترلر فرستاده میشود.بعضی از زبانهای برنامه نویسی که برای استفاده کنندگان و یا محققان از اهمیت زیادی برخوردار است عبارتنداز:


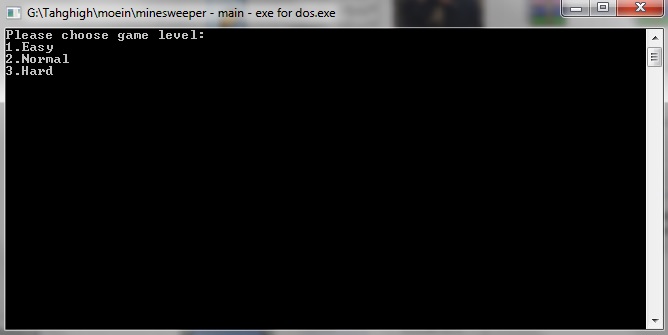
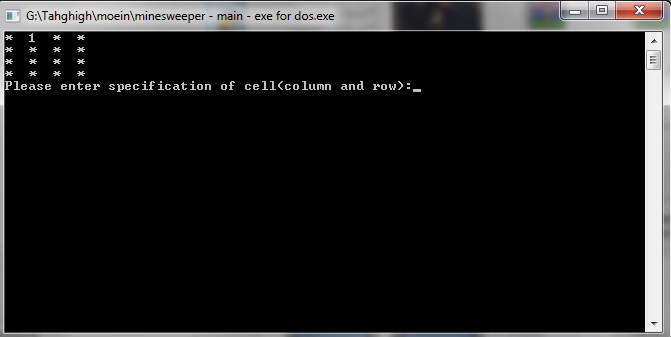
دانلود سورس آماده بازی مین یاب کامپیوتر ( Minesweeper ) به زبان سی پلاس Cpp
این پروژه C++ برای دانشجویان دروس مبانی کامپیوتر ، ساختمان داده ، برنامه نویسی و ... میتواند مورد استفاده قرار بگیرد .
ضمنا فایل اجرایی ( Exe ) این سورس هم قرار گرفته است .
حتما شما هم با بازی مین یاب معروف ویندوز مایکروسافت آشنا هستید .
در این پروژه ی سی پلاس پلاس ، این بازی به صورت کامل در محیط داس ( DOS )
شبیه سازی شده است و حتی دارای سه مرحله ی آسان ، معمولی و حرفه ای هم میباشد !